Research
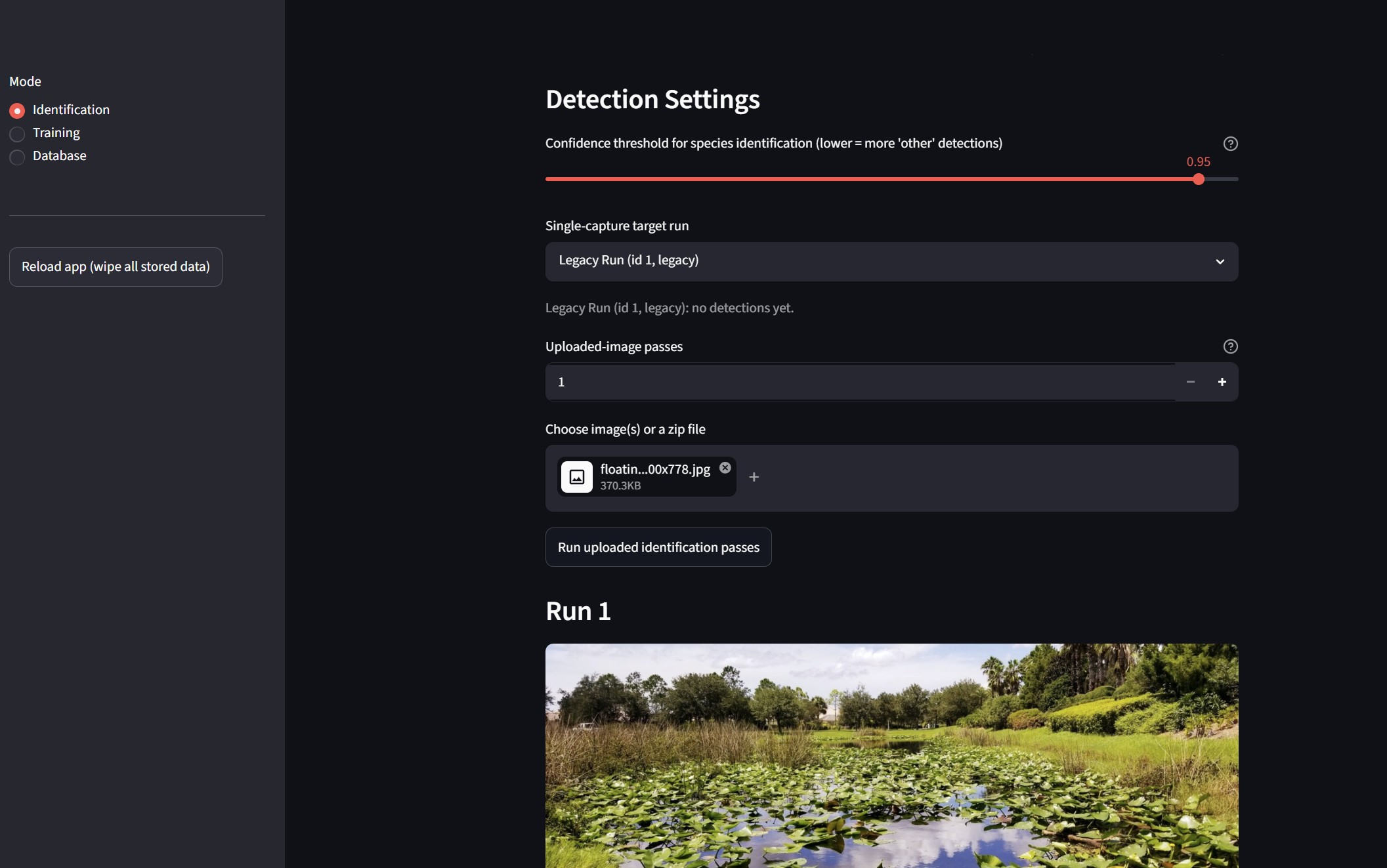
AI Identification and Mapping of Invasive Aquatic Plants
Computer VisionMachine LearningEnvironmental MonitoringRemote SensingAI-Assisted Learning
This project develops an AI-based system using a convolutional neural network to identify aquatic plant species from images, particularly distinguishing yellow floating heart from visually similar classes. A custom dataset, together with data preprocessing, augmentation, and iterative model optimization, was used to achieve strong classification accuracy and generalization performance. The final system, equipped with a real-time user interface, provides a scalable and efficient solution for automated plant identification, reducing reliance on manual inspection.
![]()
An Immersive Virtual Reality Learning System with an LLM-Integrated Conversational Avatar for Real-Time Educational Assistance
Virtual RealityLarge Language ModelsHuman-Computer InteractionUnity EngineAI-Assisted Learning
This project develops an immersive VR learning system integrated with an LLM-powered conversational avatar for real-time educational assistance. The system enables in-environment question answering within a virtual classroom, addressing the lack of open-ended interaction in existing VR tools. A Unity-based prototype with a local LLM was evaluated through case studies and baseline comparison with a PC-based AI system.
Development of an Interactive AR-Based Educational Application for Demonstrating Newton’s Cradle Motion
Augmented RealityInteractive LearningHuman-Computer InteractionUnity Engine
This project presents the development of an interactive augmented reality (AR) application designed to demonstrate the motion of a Newton’s cradle for educational purposes. With the increasing use of mobile devices among children, the application aims to leverage AR technology to provide an engaging and accessible platform for learning fundamental physics concepts such as momentum transfer, energy conservation, and damping.
Advanced Mixed Reality Training for First Responders in Hurricane Scenarios
Mixed RealityFirst RespondersHurricane ScenariosTraining Simulation
This project develops and evaluates an advanced Mixed Reality (MR) training platform for hurricane and flood response, aimed at enhancing preparedness for both first responders and community members. Built using Unity and deployed on the Meta Quest 3, the system overlays dynamic virtual hazards nto real-world environments.
Real-Time Object Detection for Mixed Reality on Meta Quest 3S Using AI Building Blocks
Augmented RealityMixed RealityObject DetectionUnityMeta Quest 3S
This research project focuses on the development and deployment of a real-time object detection system for Mixed Reality (MR) and Virtual Reality (VR) environments using the Meta Quest 3S platform. Leveraging the newly released AI Building Blocks provided in Meta SDK v83+ and the Meta XR MR Utility Kit v83+.
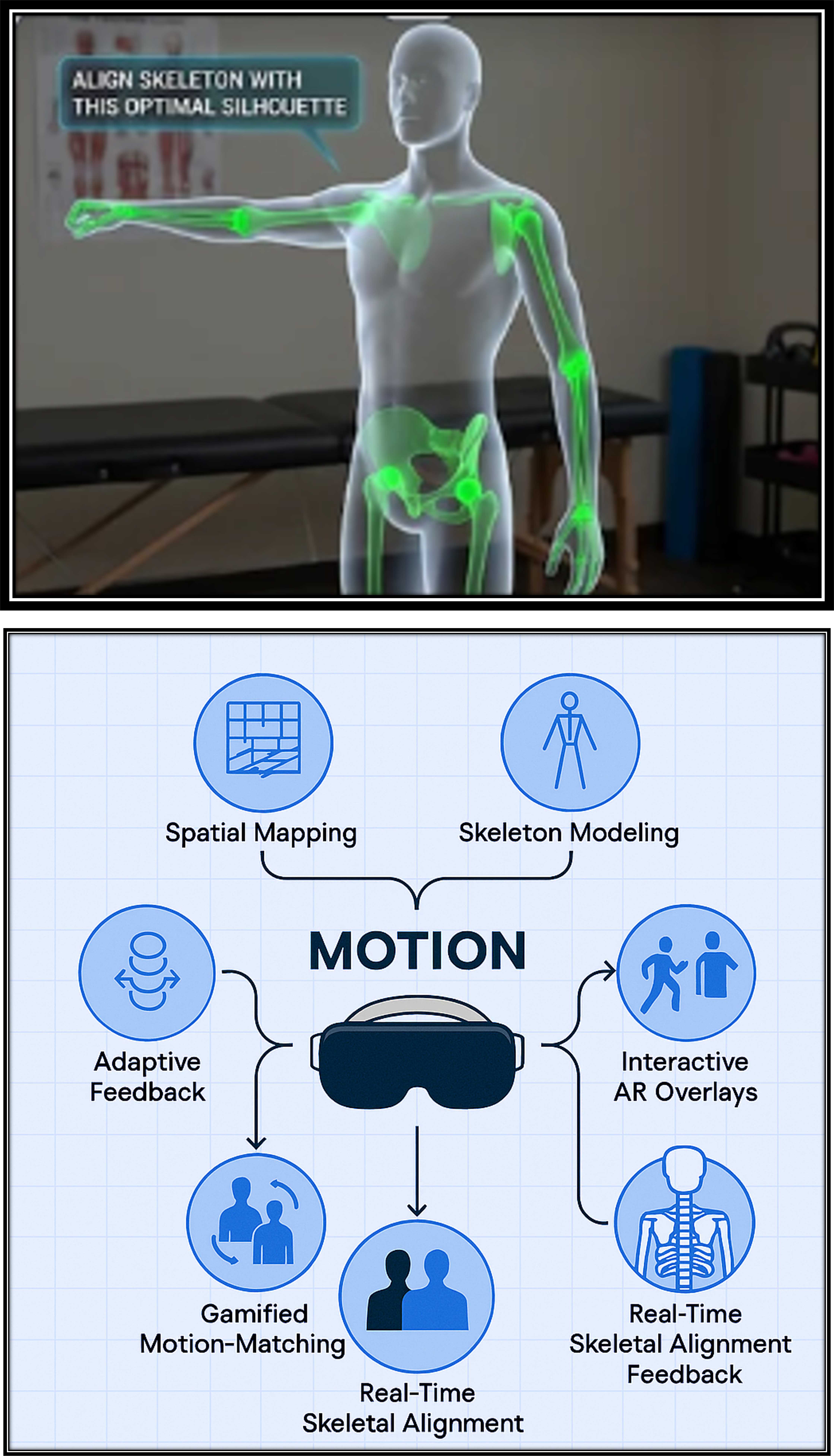
MOTION: AI-Driven Biomechanical Motion Capture for Augmented Reality Rehabilitation
Mixed RealityMotion CaptureEmbodied InteractionAdaptive Interfaces
MOTION is an AI-powered AR rehabilitation system that uses real-time biomechanical motion capture and adaptive feedback to improve movement accuracy and engagement. By combining body tracking, gamified interaction, and remote clinician support, the platform enables accessible and personalized rehabilitation in XR environments.
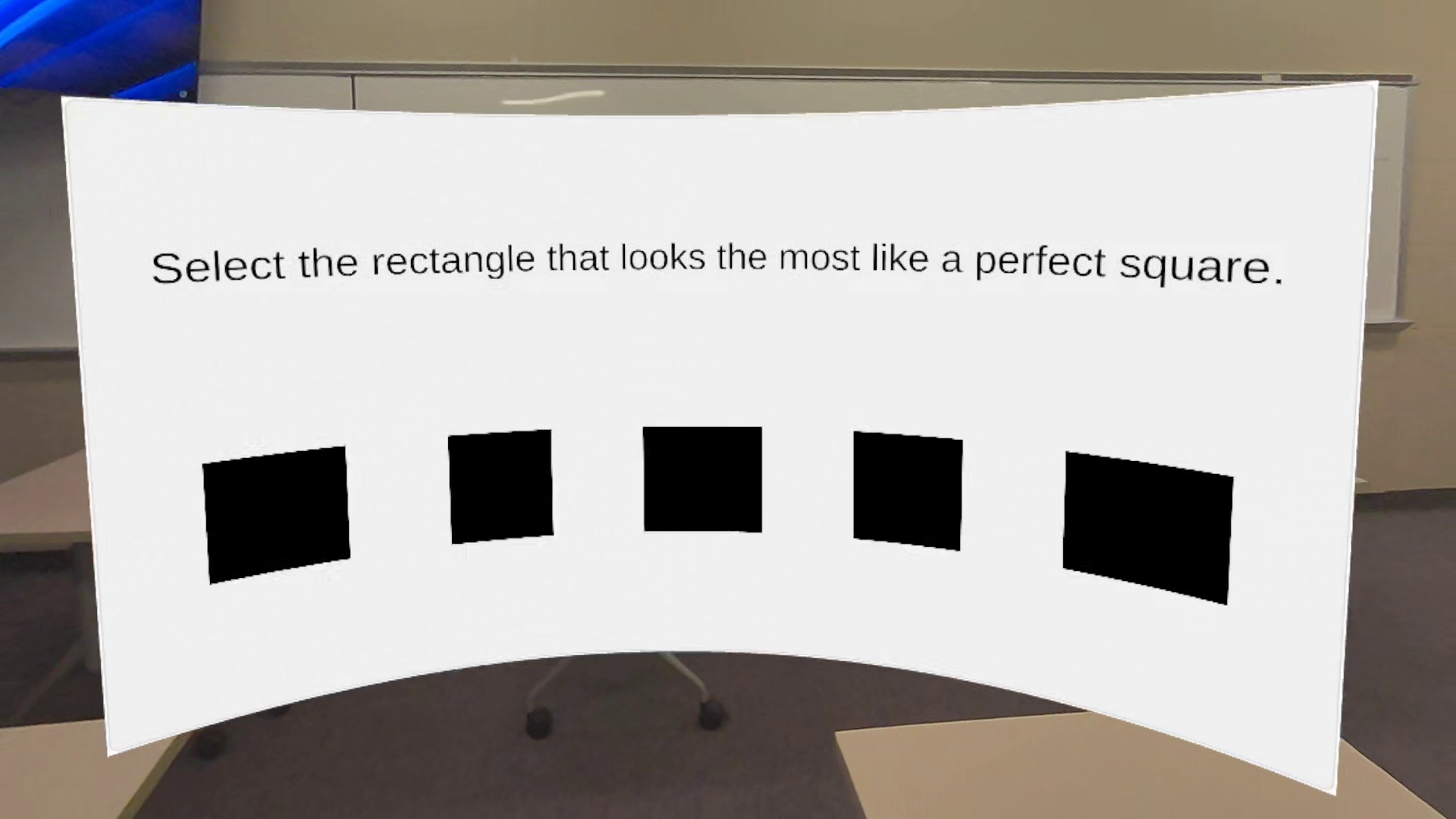
Seeing Isn’t Believing: The Vertical-Horizontal Illusion Across Screens and XR Headsets
Mixed RealityHead-Mounted DisplaysHuman Computer InteractionSpatial Perception
The Vertical-Horizontal Illusion (VHI) biases perceived geometric proportions across visual displays. This study introduces the Square Recognition Test (SRT), a unified method to measure perceived squareness across devices. A within-subject study (N = 24) on PC, mobile, and AR HMDs shows a consistent bias toward slightly wider-than-tall rectangles (PSE ≈ 1.02-1.04), indicating device-invariant VHI effects.
Exploring the Adversarial Vulnerabilities of Vision-Language-Action Models in Robotics
Vision-Language-Action (VLA)RoboticsAdversarial AttacksRobustness EvaluationRobot Trajectory ManipulationEmbodied AI
Vision-Language-Action (VLA) models enable robots to perform complex tasks by integrating visual and language inputs, but they also introduce new security risks. This work systematically evaluates VLA robustness by designing both untargeted and targeted attacks that exploit spatial and functional properties of robotics. We further propose a physical adversarial patch attack, effective in both simulation and real-world settings. Experiments show up to a 100% drop in task success rates, revealing critical vulnerabilities and motivating the need for stronger defenses in VLA-based robotic systems.
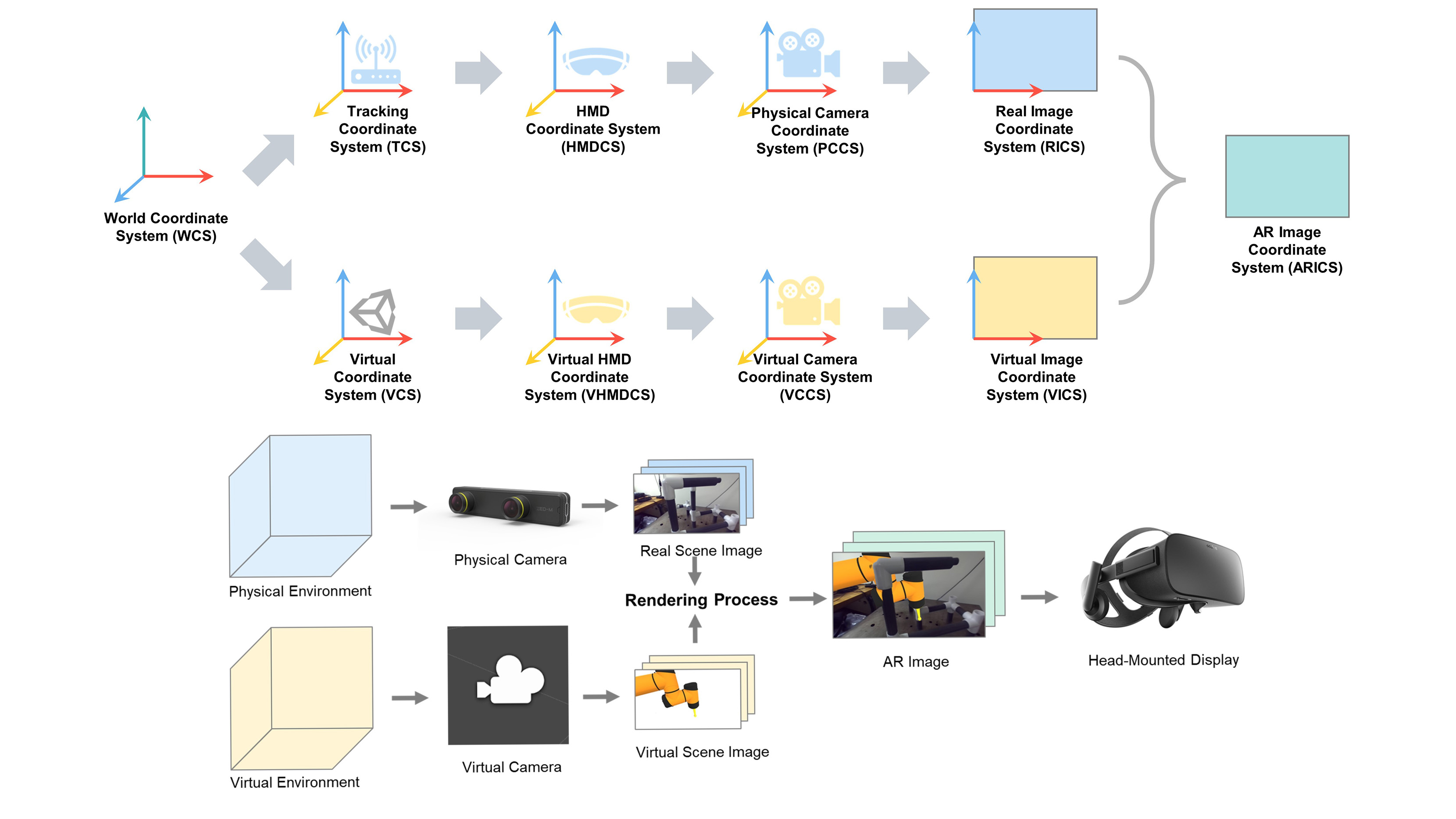
A global calibration to solve the misregistration problems in VST AR system
Augmented RealityCalibrationErrorsRobots
The purpose of this study is to introduce a calibration method for the registration problem in a video seethrough Augmented Reality (AR) system. This study investigates error sources and presents an efficient calibration procedure to reduce the misalignment accuracy via HMD-to-Camera transformation.

A Tele-robot System with Mixed-Reality Interaction
Augmented RealityTeleoperationUser InterfaceRobotics
This study describes the development of a tele-robot control system that utilizes a Mixed Reality headset, (HoloLens 2), to remotely control Automated Guided Vehicles (Rover Pro). The system features a user-friendly interface that offers three control methods: motion control, physical button control, and virtual button control.

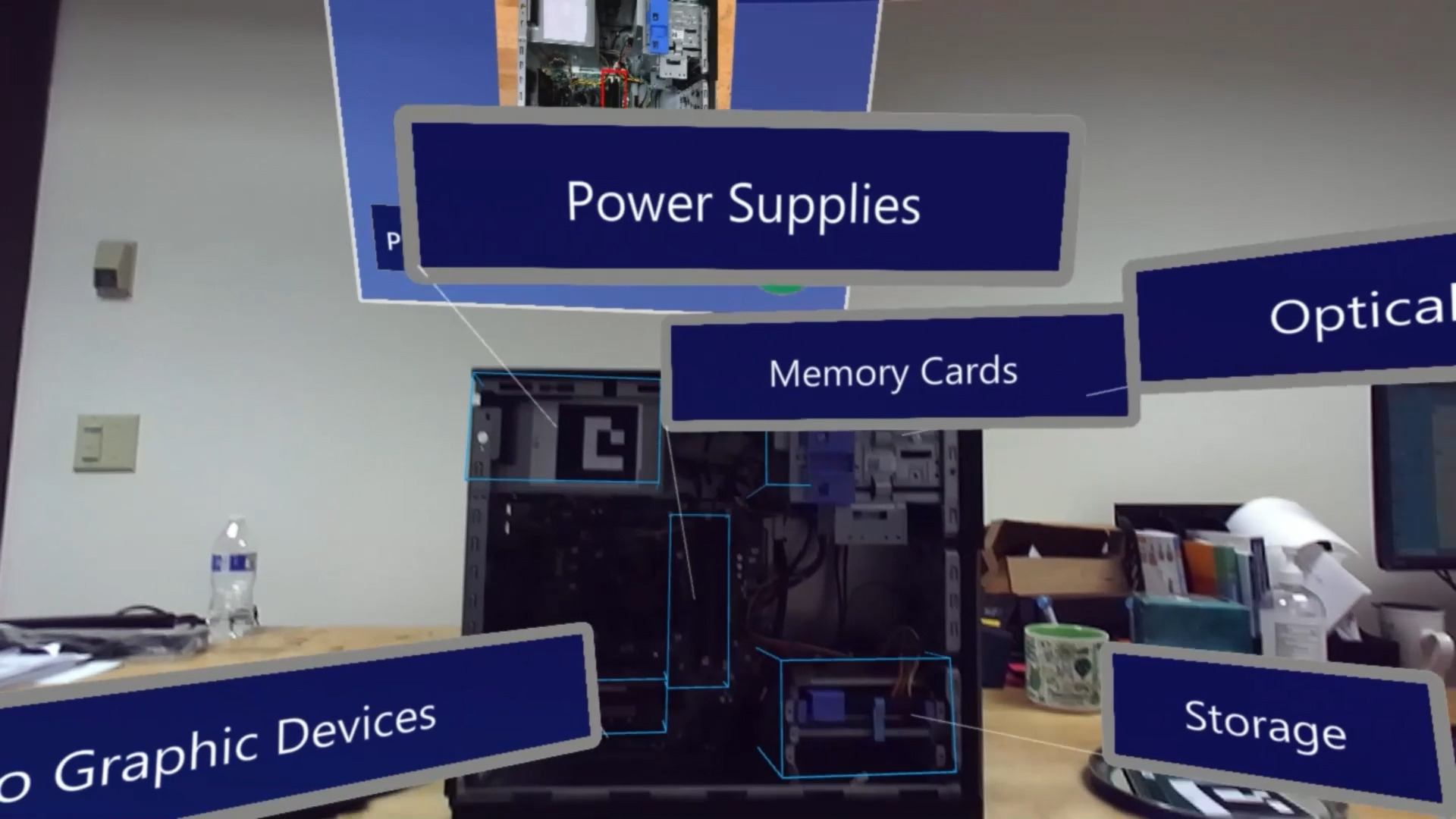
Augmented reality assisted smart factory management system development
Augmented RealitySmart FactoryDigital Twin
An AR headset-based prototyping system has been developed to offer a clear and intuitive digital visualization for the purpose of exploring the potential applications of smart factories. This project presents a case study of a maintenance application in a CNC machine shop for technicians.
Augmented reality assisted maintenance and repair system development
Augmented Reality
This project demonstrates the potential of utilizing digital twin technology with an Augmented Reality interface for improved maintenance procedures. By presenting a demo system of a repair process, this work aims to highlight the benefits of using AR for clear and intuitive visualization of the device being repaired, resulting in improved accuracy and ease of instruction for technicians.
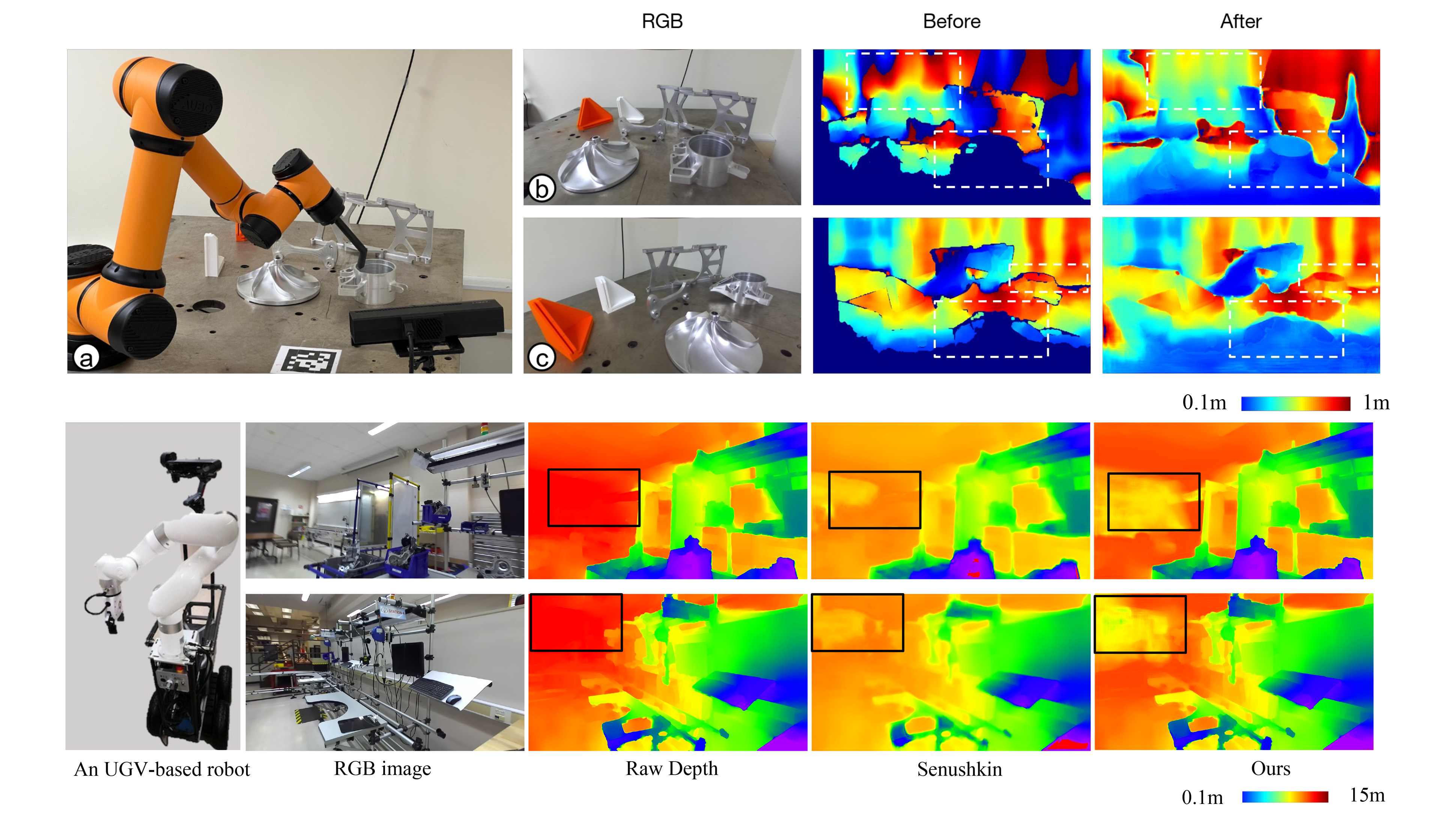
An application of depth map completion and super-resolution in AR rendering
Augmented Reality
This project presents an experiment on an AR-based human-robot interaction scenario, aimed at demonstrating the effectiveness of a proposed method for addressing occlusion problems in the rendering of virtual objects. The method involves the use of depth completion and super-resolution techniques to enhance the visual quality.
Visualization error analysis for augmented reality stereo VST system
Augmented Reality
In this research study, the sources of registration errors were identified in stereo video see-through systems and a mathematical model was established to describe the propagation of these errors in the display process.
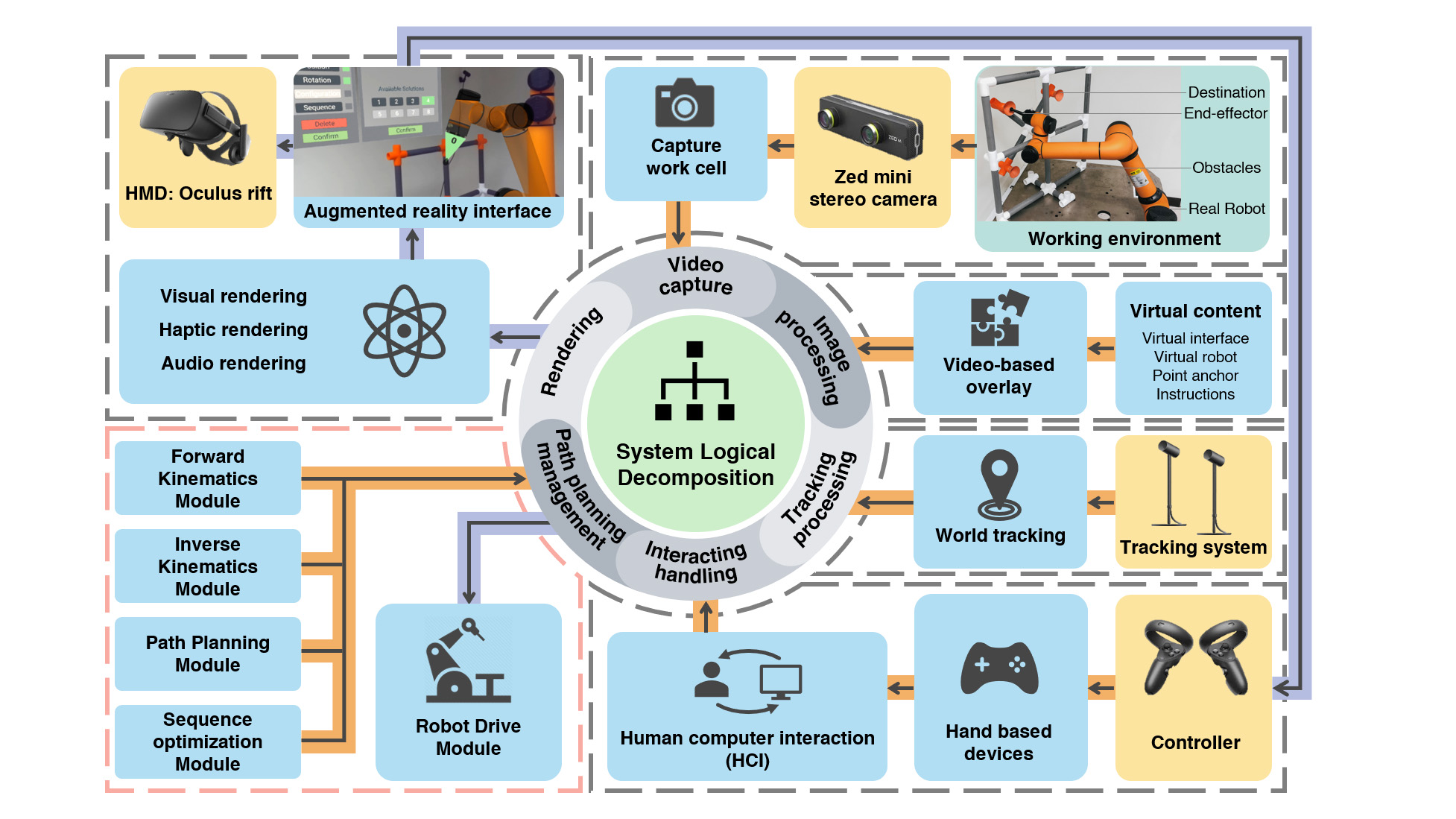
System design of a human-centered AR HRI with cognition awareness
Human-Robot InteractionAugmented RealityCognition AwarenessCognitive Load TheoryLearning Science
This work proposed a novel system, HAR2bot, for path planning tasks in complex environments. The proposed system effectively balances the communication between the operator and the robot to minimize the cognitive burden associated with the design loop, leading to improved task efficiency and accuracy.
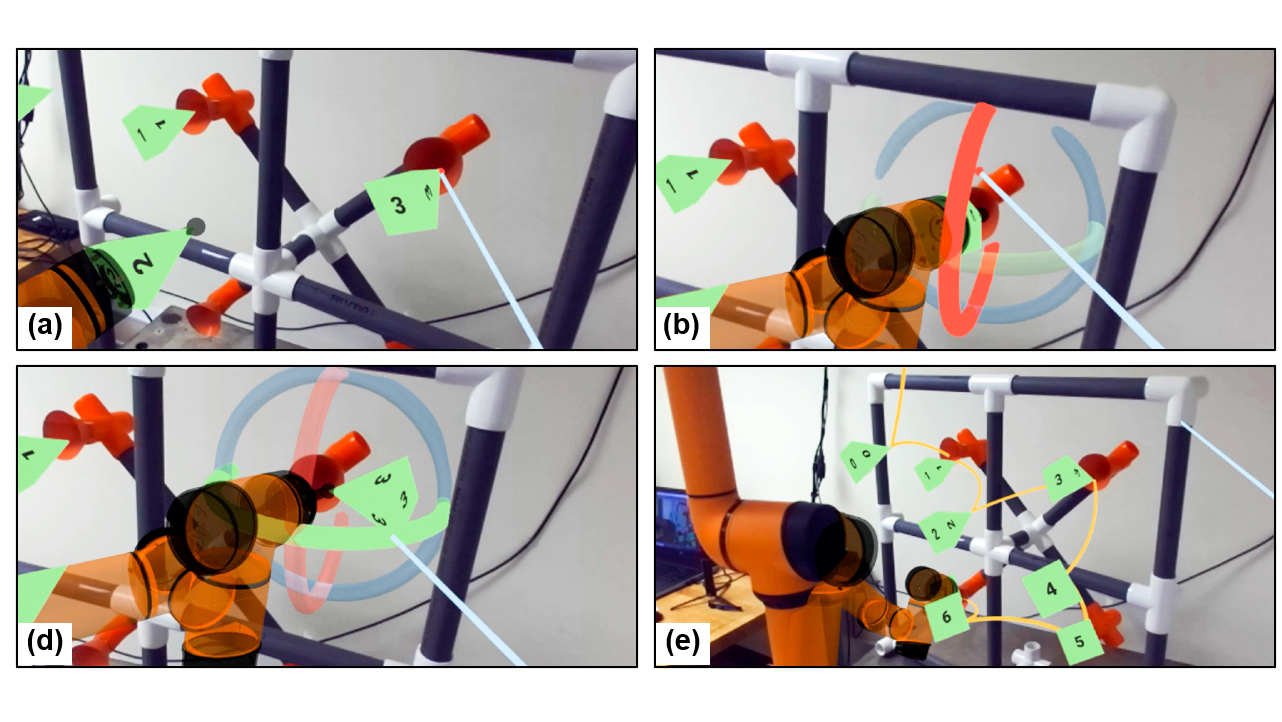
Augmented reality-based human-robot interaction system
Human-Robot InteractionAugmented RealityRobot Programming
This project proposed and developed an intuitive and immersive AR-based interface for cobot (AUBO i5) programming, aiming to address the challenges in performing path planning tasks in complex environments.